このガイドでは、設計から試運転まで、コンベヤベルトの張力を計算、調整、検証する方法を説明します。ISO 5048、CEMA、DIN 22101を比較し、T₁/T₂/T₀を明確にし、それぞれの方法が適切な場合について説明します。現場ですぐに使える公式、実例、HTML対応の式、たるみ率、ロードセルの読み取り値、巻き取り戦略といった実用的なチェック項目も掲載しています。内容は規格と現場の実践に基づいており、誇張表現は一切なく、効果的な方法のみを網羅しています。簡潔な推奨事項、トラブルシューティングに関するFAQ、そしてシステムの効率性、信頼性、安全性を維持するためのテンプレートもご用意しています。
1. コンベアベルトの張力がパフォーマンスのすべてを左右する理由
ベルトコンベアシステム全体において、コンベアベルトの張力は「設計性能」と「実際の運転性能」を結びつける重要な変数です。
コンベヤベルト自体の特性(引張強度、弾性率、接合効率、被覆ゴムの耐摩耗性および耐熱性など)は、その最大荷重容量を決定するだけでなく、ゴム製コンベヤベルトが耐えられる最大張力も決定します。コンベヤベルト張力の役割は、これらの設計パラメータが現場運用において適切に機能することを保証することです。
- 設計レベルでは、張力によってコンベアベルトと駆動ローラー間の摩擦が制御され、駆動力が効果的に伝達されます。
- 動作レベルでは、張力によって戻りセクションで適切なたるみ率が維持され、ベルトの滑りやたるみが防止されます。
- メンテナンスレベル張力の変化は、アイドラー抵抗の変化、接合部の伸び、張力装置の衰えなど、機器の状態の安定性を反映します。
コンベアベルトの張力が低すぎると、コンベアベルトが滑り、 コース外を走る搬送効率を低下させることもあります。ひどい場合には、 ゴム製コンベアベルト (NAIST) と アイドラーまたは駆動プーリー.
張力が高すぎると、ベルトの芯繊維が疲労し、 過負荷損傷 ローラーベアリングに、そして時期尚早 関節のひび割れ最終的には両者にとって損失となる状況に陥ります。
したがって、 DIN 22101、CEMA、および ISO 5048 いずれも張力をシステム制御変数とみなします。張力はコンベヤ ベルトの強度を決定するものではなく、コンベヤ ベルトがその強度範囲内で安定して安全に動作できるかどうかを決定します。
As ISO 5048 状態:
「有効張力の適切な制御は、ベルトコンベアのパワーと信頼性を計算する基礎となります。」

2. コンベアベルトの張力を理解する - それが実際に何を意味するのか
コンベア ベルトの張力は、定量化、計算、調整が可能な物理量です。
コンベアベルト システムを製造および運用するエンジニアとして、私は運用中に次の 3 つの主要なパラメータに重点を置いています。
- タイトサイド張力(T₁):駆動ローラー出口での最大張力。システム全体の抵抗を克服するために使用されます。
- たるみ側張力(T₂):滑りを防止するために使用される、駆動ローラー入口での最小張力。
- 初期張力(T₀):静止時のコンベア ベルトのプリロード。システムの起動時に十分な摩擦を確保します。
どの規格(DIN 22101、CEMA、または ISO 5048)でも、張力計算の基本的な目的は同じです。つまり、T₂ を安全な範囲内に保ち、滑りを防止しながら、T₁ がベルトの最大許容応力を超えないようにすることです。
張力はシステムの「機械的なバランサー」と考えることができます。
これにより、駆動端での摩擦、搬送される材料の重力、およびアイドラーの抵抗の間の動的なバランスが確保されます。
このバランスが崩れると、その結果は明白になります。ベルトのずれ滑り、関節の疲労、アイドラーローラーの過熱、エネルギー消費の増加が発生します。
これが、張力計算において、常に最初にT₂ ≥ Fを計算する理由である。合計 / (e(μ·α) – 1).
この条件が満たされた場合にのみ、コンベヤベルトは安定して動作し、設計強度を十分に発揮することができます。
3. コンベアベルトの張力に影響を与える主な変数
コンベア システムの試運転中、コンベア ベルトの張力にはさまざまな要因が影響します。
これらの変数には、構造パラメータ、動作条件、輸送される材料の物理的特性が含まれます。
したがって、張力を計算する前にこれらのパラメータを理解しておく必要があります。
(1)ベルト速度(v)
ベルト速度が速いほど、システムの慣性が大きくなり、始動時の張力と動的変動が増加します。
高速コンベアでは、起動時のピーク張力は通常、定常状態の張力よりも 30%~50% 高くなります。
したがって、設計では開始係数 Ks を考慮する必要があります。
(2)アイドラーと摩擦損失(f)
アイドラーベアリング間の摩擦、ベルトとアイドラーの接触、シュートとクリーナーの抵抗、駆動ローラーのゴムコーティングとコンベアベルトの接触面間の摩擦など
これらが総じて一次抵抗を構成します。DIN 22101とISO 5048はどちらも、コンベアベルトの張力をf × L × g × (qR + qG + …)という式で計算します。
現場メンテナンスにおいて、アイドラー抵抗の変化は、張力の不安定性の主な原因の 1 つとなることがよくあります。
(3)材料負荷(qB)
搬送能力が大きいほど、ベルトにかかる重力と摩擦抵抗が大きくなり、張力も大きくなります。これはゴムバンドを伸ばすのに似ています。伸ばしたゴムバンドの中央に圧力をかけると、バンドが以前よりもきつく締まったように感じるでしょう。
長距離コンベアでは、材料の質量がシステム全体の抵抗の 60% 以上を占めることがよくあります。
(4)リフト(H)
コンベアに高低差がある場合、揚力抵抗によって実効張力が直接増加します。
上り坂セクション: 張力が増大します。下り坂セクション: 重力が補助となり、張力の逆転を防ぐためにブレーキまたは減衰装置が必要になります。
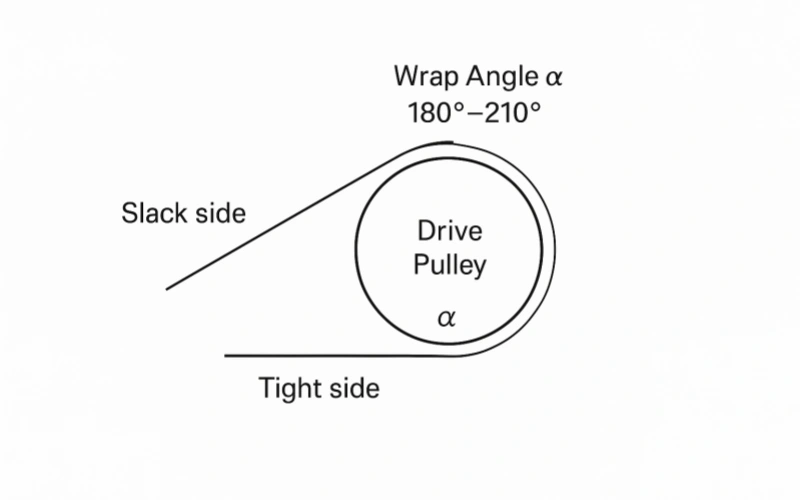
(5) 巻き角(α)と摩擦係数(μ)
次の 2 つのパラメータによって、ドライブ エンドの牽引能力が決まります。
張力比の式 T₁/T₂ ≤ e^(μ·α) は、すべての規格における中核となる関係です。
ローラーのラップ角度を大きくするか、摩擦係数を改善する(例:セラミックコーティングの使用)
張力を増加させずに駆動力を高めることができます。
ヒント: 多くの人はラップ角度は 180 度であるべきだと考えていますが、多くの企業は駆動ローラーの近くにガイド ローラーを追加して、駆動ローラーとコンベア ベルトの接触角度が 180 度を超え、接触摩擦を効果的に高めることを選択しています。
(6)ベルトの剛性とカーカスの種類
EP、NN、ST コンベヤ ベルトは張力応答が大きく異なります。
- EPベルト: 弾性率が高く、ある程度の伸長性があり、走行安定性に優れています。
- NNベルト: 縦弾性係数が低く、横方向の柔軟性に優れ、耐衝撃性が強い。短距離、高落下、頻繁な起動条件に適しています。
- STベルト: 極めて高い縦剛性、均一な張力分布、そして最小限の伸びを特徴とし、長距離、高張力、高荷重システムで使用されます。しかし、複雑なジョイント構造とワイヤーロープ芯線の引張強度が低いため、コンベヤベルトの高張力に対して非常に敏感です。
したがって、コンベア ベルトの張力は経験的に設定される値ではなく、システム パラメータの組み合わせによって決定されるバランスの取れた結果です。
そのため、設計プロセスでは、ベルト速度、傾斜角度、ドラムラップ角度などのパラメータを変更する場合は、単に「感覚」で調整するのではなく、張力を再計算する必要があります。
4. ISO方式:ISO規格に従ったコンベヤベルト張力の計算方法
国際プロジェクトでは、通常、ISO 5048:1989「ベルトコンベヤ - 動作電力および張力の計算」を使用して、コンベヤベルトの張力を計算しします。
CEMA や DIN とは異なり、ISO のアプローチでは張力と力のバランスを同時に考慮するため、国際認証を必要とするプロジェクトに適しています。
この方法の核心は、コンベアの動作中に発生するさまざまな抵抗を個別に計算し、物理モデルを使用してベルト上のさまざまなポイントでの張力分布を導き出すことです。
4.1 入力パラメータ
計算の前に、以下のデータを収集する必要があります。すべてのパラメータは国際単位系(SI)で表されます。
| 表記法 | 意味 | ユニット | 代表的な範囲 |
| L | コンベアの全長 | m | 20-2000 |
| H | 高度を上げる(上り坂はプラス) | m | -100 – 200 |
| β | 傾き | ° | 0-20 |
| v | ベルト速度 | ミズ | 0.8-6.5 |
| Im | 搬送量 | t / h | 50-5000 |
| m′B | コンベアベルト単位質量 | キログラム/メートル | 10-40 |
| m′Ro | 荷重支持部アイドラーローラーの単位質量 | キログラム/メートル | 20-80 |
| m′Ru | 戻り部アイドラーローラーの単位質量 | キログラム/メートル | 10-40 |
| f | 主摩擦係数 | – | 0.020-0.040 |
| μ | ローラー摩擦係数 | – | 0.30-0.45 |
| α | 角を囲む | ° | 120-240 |
| B | 帯域幅 | mm | 500-2000 |
| g | 帯域幅 | m /s² | 9.81 |
4.2 材料単位質量
まず、1時間あたりの搬送能力を単位長さあたりの質量に変換します。
この値は、コンベア ベルト 1 メートルあたりに運ばれる材料の重量を表し、以降のすべての張力計算の基礎となります。
4.3 一次抵抗(FH)
この抵抗部分は主に、アイドラーの回転、コンベヤ ベルトの曲がり、および材料とベルト表面の間の摩擦によって発生します。
ほとんどの場合、総抵抗の 60% 以上を占めます。
4.4 二次抵抗、FS
ISO では、局所抵抗を次のような別個の項目として分類しています。
1.飼料抵抗
2.スイーパー抵抗:300~800 N/ユニット
3.チャネル抵抗:500~1500 N
4.その他の装置(プラウ式アンローダー、排出口等)
4.5 揚力抵抗、FSt
H > 0(上り搬送)の場合、張力が増加します。
H < 0(下り搬送)の場合、張力は減少します。
4.6 戻り抵抗、FR
ISOは、この部分を無視できないことを特に強調しています。通常、m′Ru ≈ 0.5 × m′Ro となります。
4.7 T総走行抵抗、FU
これは、コンベアの定常動作中に駆動ドラムが克服する必要がある総抵抗です。
4.8 摩擦係数、C
C = e(μ × α × π / 180)
標準値:
μ = 0.35、α = 180° → C ≈ 3.00
μ = 0.40、α = 210° → C ≈ 3.46
C値が大きいほど、ローラーとベルト表面の摩擦が十分になり、滑り止め能力が強くなります。
4.9 スラックサイドテンション、F₂
ISO 5048 では、滑りを防止するために、コンベヤベルトのたるみ端張力が定格ベルト強度の特定のパーセンテージ未満であってはならないと規定されています。
Sr 単位幅あたりの定格引張強度(N/mm)を表します。
4.10 タイトサイドテンション、F₁
これは、駆動ローラー出口における最大定常張力です。
4.11 電力、P
P =
FU × v
1000
4.12 最大ベルト張力、Fマックス
コンベアに凹面または曲線部分がある場合:
レイアウトが直線の場合、次のように簡略化できます。
4.13 ベルト強度チェック、K
- SF = 安全係数(EP:8~10、NN:7~9、ST:6~7)
- B = ベルト幅(mm)
- Sr = コンベアベルトの定格強度(N/mm)
設計要件:
Sr ≥ K
SF = 安全係数(EP: 8–10、NN: 7–9、ST: 6–7)
この条件が満たされると、コンベアベルトの強度が適切に選択されます。
4.14 エンジニアリング解釈
エンジニアリングの観点から見ると、ISO メソッドの利点は、完全な構造、統一された計算ロジック、および結果の相互検証です。
次の 3 種類のキー データを同時に提供できます。
- FU: 駆動力とローラーの選択に使用
- F2: 張力装置の設計に使用
- Fマックス: コンベアベルトの強度検証に使用
私が参加した国際的なEPCプロジェクトでは、この方法は設計者、監督者、そして トップメーカーが 同じ論理に基づいて緊張の合理性について議論する。
5. CEMA法:コンベアベルト張力計算におけるアメリカのアプローチ
北米市場では、コンベアの設計には CEMA (Conveyor Equipment Manufacturers Association) 規格が一般的に採用されています。
その代表的な文書は「CEMA バルク材料用ベルトコンベア」であり、CEMA ベルトブックとも呼ばれています。
ISOと比較して、CEMA法はより実用的である。完全な物理的モデリングを追求するのではなく、経験的なコンポーネント張力アプローチを中核として採用している。
異なるセクションの抵抗をグループ化して合計することにより、必要な有効ベルト張力 (Te) を計算します。
5.1 CEMAの基本的な計算フレームワーク
CEMA は、コンベア全体の張力を 4 つの主要コンポーネントに分割します。
TE = TL + TH + TX + TY
| 表記法 | 意味 |
| TL | 作動摩擦抵抗 |
| TH | 持ち上げ抵抗 |
| TX | 追加の抵抗(スクレーパー、給餌シュートなど) |
| TY | 特殊な抵抗(曲げ、材料の落下、加速など) |
TE (有効張力) は、システムが動作するために必要な総張力です。
ISO の区分積分法とは異なり、CEMA は加重係数を使用して主抵抗を迅速に計算するため、迅速な選択や予備設計段階に適しています。
5.2 各項目の計算ロジック
(1)摩擦抵抗(TL)
TL = f × L × ( WB + WM )
- f: 摩擦係数(0.02~04)
- WB: コンベアベルトの単位重量(lb/ft または kg/m)
- WM: 材料の単位重量
これは通常、全体の張力の 60%~70% を占めます。
(2) 揚力抵抗(TH)
TH = 高さ × ( 幅B + WM )
上り坂または下り坂で輸送される位置エネルギーの変化は、位置エネルギーの変化に対応します。
(3) アクセサリ抵抗(TX)
スイーパー、フィードシュート、プラウ型アンローダーなどの機器の追加抵抗を計算するために使用されます。
通常は経験的データシートで示されます (300~800 N/個)。
(4)特殊耐性(TY)
これらには加速抵抗と曲線抵抗が含まれ、起動時の過渡的な張力変動を修正するために使用されます。
5.3 張力関係(タイトサイドとスラックサイド)
CEMA と ISO はどちらも、ドライブドラムの牽引能力を説明するためにオイラー方程式を使用しています。
T1 - T2 = TE
T1 / T2 = と(μ × α)
ただし、実際のアプリケーションでは、CEMA は T2 の最小制御値に重点を置いています。
標準的な推奨事項:
T2 ≥ 0.10 × Sr ×B
つまり、緩いエッジの張力はベルト強度の少なくとも 10% である必要があります。
この経験的係数は ISO よりも保守的 (EP/NN の場合は 8%、ST の場合は 6%) であり、頻繁な開始と停止のサイクルや重い負荷がかかるマイニング システムに適しています。
5.4 初期張力と定常張力の二重計算
CEMA は特に 2 つの異なる動作条件を重視しています。
1.定常状態(通常の動作) — コンベアの定常運転中の有効張力。
2.始動(加速段階) — 始動段階での一時的な張力。
CEMA の推奨事項:
TE、開始 =Ks × TE、実行
K8 は開始係数であり、通常は 1.3 ~ 1.5 とされます。
つまり、起動時には、システムの張力が通常の動作時よりも 30%~50% 高くなる可能性があります。
したがって、設計および選択、特にモーターの出力、ローラーのラップ角度、およびジョイントの強度の検証時には、この係数を考慮する必要があります。
5.5 巻き取り張力に関する経験要件
CEMA は、張力装置の最小予張力に関する経験値も提供しています。
T取り上げる ≥ 0.10 × Sr ×B
この「10% ルール」は CEMA 方法論の中心です。
あらゆる動作条件下でコンベヤベルトと駆動ローラーの間に十分な摩擦を確保し、滑りを防止します。
北米の鉱業プロジェクトでは、これはほぼデフォルトのルールです。
5.6 CEMAの実際的な利点
私のエンジニアリング経験から言うと、CEMA の最大の利点は次のとおりです。
- 直感的で高速な計算: 予備設計および選択に最適です。
- 成熟したデータシステム: 多数の米国標準機器パラメータ(アイドラー、スイーパー、ドラム)をカバーします。
- 保守的な安全係数: 頻繁な始動停止や埃っぽい環境でも信頼性が高まります。
しかし、それには限界もある。
CEMA はシステム抵抗の線形分布を前提としているため、非常に長い距離、非常に急な斜面、または特殊な作業条件には適していません (このようなプロジェクトには DIN 22101 が推奨されます)。
5.7 CEMAとISOの違い
| 比較項目 | ISO方式 | CEMA 方法 |
| コアロジック | 物理モデリング + 包括的な抵抗分析 | サブ項目経験係数法 |
| 該当するシナリオ | 国際産業プロジェクト、長距離コンベア | サブ項目経験係数法 |
| 計算内容 | 緊張 + パワーバランス | 緊張が主な要因 |
| 緩い端の張力の下限 | 6~8% × Sr ×B | 10% × Sr ×B |
| 始動係数 | オプション(動的解析) | 考慮する必要がある(1.3~1.5) |
| 利点 | 正確なトレーサビリティ | 高速、安定、安全 |
北米では、メンテナンス チームによく次のことを伝えています。
「ベルトが滑ったら、まずはパワーではなく張力から始めてください。」これはまさに CEMA の理念です。コンベヤの問題のほとんどは、モーターのパワーを上げるのではなく、適切な張力制御で解決します。
6. DIN 22101 コンベアベルト張力計算方法
3 つの主要な国際規格の中で、DIN 22101 は最も完全な数学モデルと最も厳密な内訳を備えています。
これは実質的に「コンベアベルト張力計算」の業界標準フレームワークを定義しており、特に長距離コンベアや高強度コンベアの設計で広く使用されています。 スチールコードベルト.
実際のプロジェクトでは、私はよくこう言います。
「コンベアベルトがどの程度の力に耐えているかを正確に知る必要がある場合は、DIN 22101 を使用してください。」
なぜなら、これは「総張力」を計算するだけでなく、すべての力の発生源を段階的に分解するからです。
6.1 計算の基本ロジック
DIN では、システム全体の抵抗を次の 3 つの主要部分に分割しています。
Fu =Fh + FN ± Fst
| 表記法 | 意味 |
| Fh | 一次抵抗 |
| FN | 二次抵抗(クリーナー、給餌シュートなど) |
| Fst | 揚力抵抗 |
このステップの中核は、幾何学的パラメータ、質量パラメータ、および摩擦係数を使用して、ローラーを駆動するために必要な円周力 F_u、つまり、システムが実際に動作しているときに必要な駆動力の値を計算することです。
6.2 計算 プライマリー 我が国の抵抗力
一次抵抗はコンベアの動作において最も大きな要素です。DINの式は次のとおりです。
Fh = f × L × g × [ qR + qG + ( 2qB + qG ) × cos δ ]
- f: 摩擦係数(通常0.02~0.04)
- L: コンベアの水平長さ(m)
- g: 重力加速度(9.81 m/s²)
- QB: 単位長さあたりの材料の質量(kg/m)
- qG: コンベアベルトの単位長さあたりの質量(kg/m)
- qR:回転部品の単位長さあたりの質量(kg/m)
- δ: 傾斜角度(°)
この部分は、コンベアベルトとアイドラーの摩擦と材料の移動に対する抵抗を反映し、システム全体の計算の基礎となります。
6.3 追加抵抗の計算
DIN は追加抵抗の統一された式を提供していませんが、むしろ典型的な経験値の範囲を提供しています。
一般的な項目と標準的な値は次のとおりです。
| Item | 標準値(N) | 詳細説明 |
| 飼料抵抗(Fフィード) | ( qB \times v2 ) | 材料をベルト速度まで加速するために必要なエネルギー |
| スクレーパー抵抗(Fスクレーパー) | 300-800 | スクレーパーあたり |
| スカート抵抗(Fスカート) | 500-1500 | スカート部分あたり |
| その他の抵抗(Fすき ) | 装備によって決まる | プラウ型アンローダーまたは逸脱防止装置 |
和:
FN = Σ Fi
エンジニアリングでは、詳細なデータが不足している場合、一般的に次のものが使用されます。
FN=0.03 ~ 0.05 x Fh
6.4 持ち上げ抵抗
コンベアに高さの差がある場合、材料とベルトの重力成分が張力分布に直接影響します。
Fst = H × g × ( qB + qG )
- H>0: 上り坂 → 抵抗増加
- H<0: 下り坂 → 補助流
この要素はコンベアの電力需要の方向を直接決定し、「上り」設計と「下り」設計を区別する鍵となります。
6.5 円周力の計算
上記の式によれば、
Fu =Fh + FN ± Fst
結果は、ローラーを駆動するために必要な有効駆動力 (N 単位) を表します。
これは計算システム全体の「コアノード」であり、後続のすべての張力配分、選択、および電力分析はこれを中心に行われます。
6.6 オイラー係数の計算
駆動ローラーのラップ角度と摩擦によって、コンベア ベルトのトルク伝達能力が決まります。
DIN は古典的なオイラー・アイテルヴァイン方程式を使用します。
C = e(μ × αラド )
μ:ローラーとベルト表面間の摩擦係数(0.30~0.40)
α: 囲み角(ラジアン) =αラド =α度 × π / 180
計算例:
- μ=0.35、α=180°⇒C≈3.00
- μ=0.40、α=210°⇒C≈3.51
6.7 最小たるみ側張力
DIN は、オイラー係数を使用して、駆動ローラーの滑りを防ぐために必要な最小の緩み側張力を計算します。
F2min =Fu / (C - 1)
このステップの重要性は、システムの摩擦力が円周方向の力を伝達するのに十分かどうかを判断することにあります。
実際のたるみ側の張力がこの値より低い場合、システムで滑りやベルト速度の不一致が発生します。
6.8 タイトサイド張力の計算
F1 =F2min + Fu
これは、駆動ローラー出口での最大動作張力を表します。
この値は通常、コンベア ベルトの張力分布のピーク値に近くなります。
6.9 リダイレクトローラーの追加張力
コンベアベルトが複数の方向転換ローラーを通過する場合は、追加の張力も考慮する必要があります。
Fzu =kzu × Fu
その中でKzu 通常は0.03~0.05としますが、経験値(500~2000 N)を使用します。
6.10 最大張力(Fマックス)
システムの最大張力は次のとおりです。
Fマックス =F1 + Fzu
展開すると次のようになります。
Fマックス =Fu / ( e(μ × α) - 1 ) + Fu + Fzu
この値は、コンベア ベルトの強度選択とジョイント検証に直接使用されます。
6.11 コンベアベルトの選択と安全係数
DIN では、コンベア ベルトに必要な強度は最大張力に基づいて計算する必要があることが規定されています。
K = ( SF × Fマックス )/B
- K: 必要な帯域幅(N/mm)
- SF: 安全係数(軽荷重8、中荷重9、重荷重10)
- B: ベルト幅(mm)
判断基準:
Sr ≥ K
Sr コンベアベルトの定格強度、つまり EP、NN、または ST グレードの公称強度を表します。
7. ISO、CEMA、DINによるコンベヤベルト張力の計算方法の比較方法
プロジェクトの設計段階やベルトの選択段階で、次のような質問をよく受けます。
「3つの基準の結果が異なるのはなぜですか?」
実際のところ、これはアルゴリズムが正しいか間違っているかの問題ではなく、計算の境界と仮定の違いの問題です。
7.1 3つの標準規格の核となる論理的相違点
| 比較項目 | ISO 5048 | CEMA | DIN 22101 |
| メソッドタイプ | 機械モデル + 実験的補正 | 経験的サブアイテム法 | 物理モデリング + セグメント計算 |
| 入力データ量 | 技法 | 最小 | 最大 |
| 出力コンテンツ | 緊張 + パワー | 緊張に焦点を当てた | 張力 + パワー + 強度検証 |
| 適用例 | 工業製造、国際プロジェクト | 北米鉱山、短距離システム | 長距離、急斜面、高強度システム |
| 精度 | ±10% | ±15% | ±5% |
| 計算時間 | 技法 | 対応時間 | 最も遅い(しかし最も包括的) |
ISO は物理的な平衡を重視し、CEMA は現場での経験を重視し、DIN は精度と安全係数に関して最も厳格です。
これらを本当に理解するには、張力を計算する際に各規格が何を「想定」しているかを明確に理解する必要があります。
7.2 3つの基準による計算結果の典型的な違い
典型的なコンベアを例に挙げます。
搬送長さ:L = 150 m
ベルト速度: v = 2.0 m/s
材料質量: m′G = 20 kg/m
ドラム摩擦係数:μ=0.35
ラップ角度: α = 180°
ベルト幅:B = 1000 mm
定格強度:Sₙ = 1000 N/mm
3 つの標準を使用して計算すると、次の結果が得られます (定常動作を想定)。
| Item | ISO | CEMA | DIN |
| FU(N) | 8,950 | 9,600 | 8,750 |
| F₂(北) | 4,500 | 5,500 | 4,200 |
| F₁(北) | 13,450 | 15,100 | 12,950 |
| F_max(N) | 14,000 | 15,800 | 13,600 |
| 電力 P (kW) | 18.0 | 19.5 | 17.6 |
平均すると:
- CEMA の結果は最高です (保守的すぎる)。
- DIN の結果は最も正確です (最も完全な物理モデル)。
- ISO の結果は中間 (堅牢、中程度の安全係数) です。
7.3 3つの方法における安全係数の違い
- SFイソ =6∼9
- SFセマ = 8~10
- SFから = 7〜10
CEMA では通常、デフォルトの安全マージンを高く設定しているため、コンベヤ ベルトの強度グレードは高くなりますが、安全性は高くなりますが、コストは高くなります。
一方、DIN は、正確な計算を通じて冗長な安全準備金を削減する傾向があります。
7.4 パラメータの違いが結果に与える影響
| 技術パラメータ | ISO | CEMA | DIN |
| 摩擦係数 μ | 0.30-0.40 | 0.35 | 0.32-0.40 |
| 安全係数SF | 6-9 | 8-10 | 7-10 |
| 動的係数Ks | オプション | 必須 | オプション(推奨) |
| 最小たるみ張力 | ≥6~8% × Sr ×B | ≥10% × Sr ×B | ≥6~7% × Sr ×B |
| 起動時の考慮事項 | 付録説明のみ | 必須計算 | 強く推奨する |
7.5 実用的なアプリケーションの推奨事項
- ISOを選択: 輸出プロジェクトや多国籍設計に取り組む場合、国際機関に最も認められやすい標準です。
- CEMA を選択: システムが鉱山、骨材生産ライン、またはアメリカのシステムに精通した保守担当者によって使用されている場合。
- DINを選択: これは、距離が長く、標高差が大きく、容量が大きく、ドライブセクションが複数あるシステムに最適なオプションです。
実際のシステム試運転の経験では、私は通常次のことをお勧めします。
- ISO: 計算基準;
- DIN: 強度検証
- CEMA: 現場での試運転の参考資料。
これら 3 つを組み合わせて使用することで、理論と実践の最適なバランスが実現します。
8. 実機でのコンベアベルト張力調整方法
設計段階では理論的な張力を計算します。
ただし、動作中、コンベヤベルトの実際の張力は、張力調整装置の種類、設置精度、およびメンテナンス方法によって異なります。
正しい張力調整は、システムが安定して動作できるかどうかを直接決定します。
このセクションは次のように考えることができます。
「計算された張力」→「設備上で実現される張力」へ。
8.1 3つの主流の張力調整方法
現在の産業用コンベア システムでは、主に 3 つの張力調整方法が使用されています。
| 張力の種類 | 特長 | 一般的なシナリオ |
| 重力張力 | 自動調整、スムーズな応答 | 長距離コンベア、鉱山、港 |
| 油圧張力 | 高い制御性、リモート調整 | 短距離高頻度スタートストップシステム |
| スクリューまたはウインチの張力 | 低コストで操作が簡単だが、調整ミスが発生しやすい | 工場内の短距離コンベア、仮設システム |
これら 3 つは本質的に同じことを実現します。
緩いエッジ張力Fを維持する2 設計制限内です。
8.2 張力調整ロジック
張力調整装置の調整方法は様々ですが、基本的な原理は同じです。コンベアベルトFの初期張力を制御することです。0 .
一般的なターゲット範囲は次のとおりです。
0.06 ≤ F0 / ( Sr × B ) ≤ 0.10
- F0: 初期張力(N)
- Sr: 定格ベルト強度(N/mm)
- B: ベルト幅(mm)
つまり、張力はコンベアベルトの総強度の 6%~10% にする必要があります。
この範囲では、過度の張力による布層や鋼線の疲労を引き起こすことなく、滑りを防止します。
8.3重力 緊張
これは最も古典的で安定した張力調整方法です。
重りの質量は、次の式を使用して初期張力に対応します。
W = ( 2 × F0 )/グラム
- W: カウンターウェイトの質量(kg)
- g: 重力加速度(9.81 m/s²)
実際の調整手順:
1.理論値Fを決定します。
2.カウンターウェイトを計算します。W;
3.カウンターウェイトキャリッジの高さを調整して、その移動を中央にします(通常、移動利用率は 30%~70% です)。
4. 無負荷試運転後、ベルト速度とモータ電流を観察します。起動時に滑りの兆候がある場合は、カウンターウェイトを5~10%増加させます。
Advantages:
- ベルトの長さの変化を自動的に補正します。
- 温度や伸びの影響を受けない。
- メンテナンスはほぼ不要です。
短所:
8.4 油圧 緊張
油圧テンショニングでは、油圧シリンダーを使用して一定の圧力を供給し、ベルトの張力を維持します。
F0 = p × A
- P: システム油圧(Pa)
- A: 油圧シリンダーの有効面積(m²)
調整方法:
1.目標張力Fを設定する0
2.シリンダー径に基づいて必要な油圧を計算します。
3.リリーフバルブの設定を調整します。
4.動作中は圧力センサーでリアルタイムに監視します。
Advantages:
- 高精度、リアルタイムで調整可能。
- 自動制御(PLC接続)をサポートします。
短所:
- 高コスト;
- 高いメンテナンス要件。
- 圧力が解放されると、瞬間的に緩んだり滑り落ちたりしやすくなります。
8.5 スクリューまたはウインチの巻き取り
これは最もよくある間違いですが、最も間違いやすい方法でもあります。
スクリュー変位によるコンベアベルトの伸びΔLの調整:
F0 = E × A × ( ΔL / L )
- E: コンベアベルトの弾性係数(N/mm²)
- A: ベルト断面積(mm²)
- L: コンベア長さ(mm)
実際の操作では、多くの人が感覚でネジを調整しますが、その結果、次のような問題が発生することがよくあります。
- 張力不足→ずれ、たるみ
- 過度の張力→ジョイントの破損およびアイドラーベアリングの過負荷。
調整の提案:
- 計算値に応じてΔLを制御します。
- 補助的な判断には張力計やモーター電流曲線を使用します。
- 起動後に2回目のキャリブレーションを実行します。
8.6 よくある調整ミス
| 誤った操作 | 典型的な結果 | 正しい実践 |
| 盲目的に緊張を高める | 関節の疲労、布地の剥離 | 計算範囲内で制御 |
| テンショナースライドのストロークが低すぎる | ベルトの長さの変化を補正できない | ストロークの中間点に調整する |
| ベルトの伸びを無視する | 長期的なたるみ | 24~72時間の動作後に2回目の校正 |
| テンショナーローラーのずれ | ベルトのずれ、エッジの摩耗 | 張力構造の平行度を定期的にチェックする |
正確な計算と適切な張力は関係ありません。真の安定性は、正しい調整と継続的な監視から生まれます。
9. 結論 — コンベアベルトの張力がシステムの信頼性を決定する
コンベアベルトの張力はコンベアシステムの安定した動作を決定します。
駆動効率、エネルギー消費、ベルトのずれ、滑り、ジョイント寿命に影響します。
DIN、CEMA、または ISO のどの方法を使用するかに関係なく、計算の目的は、張力を正しい範囲内に維持することだけです。
正しい張力は、正確なコンベヤ ベルトの張力計算、適切なコンベヤ ベルトの調整、およびコンベヤ ベルトの張力をチェックする方法の継続的な検証から得られます。
この3点は必須です。
結局のところ、ベルトコンベアはランダムに故障することはありません。
あらゆる失敗は間違った張力の結果です。
FAQ - コンベアベルトの張力に関する専門家の議論